


一、示教器上显示报警代码:
4107数据超出允许范围异常。(子码显示发生报警轴)
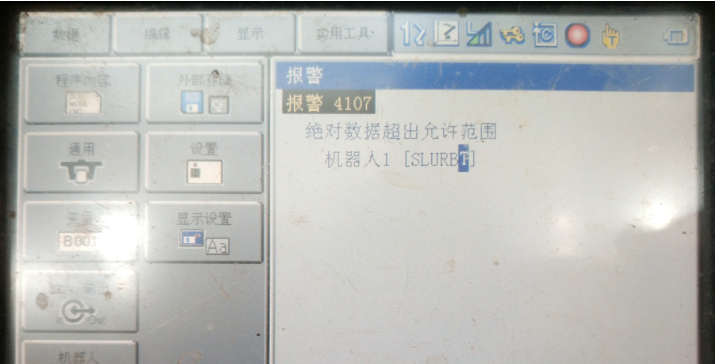
二、发生原因:
电源通断位置的差值超出允许范围。
三、处理方法:
①复位报警,选择菜单→机器人→第二原点。
②接通伺服电源,按住前进键,将机器人前进到位。
③点击菜单左上角→数据→选择位置确认,处理完成。
四、注意:
同时发生了AL1325 通信错误(编码器)时,请参照AL1325报警进行处理。
同时发生了AL1692 PG电源保险丝断线(伺服)时,请参照AL1692报警进行处理。
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种进口机器人,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理机器人于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。